

・1/3 仕様書の作成編
・2/3 プログラミング編(従来方式)
・3/3 デバッグ編(本記事)
の3記事に渡り、PLCラダー回路の作成を実際にどの様に行うかについて、具体例を使用して説明しています。
今回、実践的にPLCラダー回路の作成方法を紹介するにあたって、
まず、本記事の仕様書編は共通となっていますが、これに続く、プログラミング編とデバッ編では2種類の方法グを紹介しています。
1.大体の人が作成している一般的なPLC回路の
・従来方式
と、これを理解した上で、
2.弊社がおすすめするPLC回路である
・ステージ選択方式
と進んでそれぞれ参照して頂ければ、大容量のラダー回路もより簡単に作成することが可能と思います。
本記事で作成の回路の動作状態は、こちらの動画で[/st-kaiwa2]
【 注意事項】
取り上げたアクチュエーターは、電磁弁、または電動シリンダなどの直動端動作のシーケンス制御回路です。
各ドライバーを介して動作させるアクチュエーターなどの場合は、各ドライバーの仕様、使用方法(I/O制御、通信制御)で対象の回路位置に追加、修正をすることで対応します。
今回上位への通信やモータードライバーなどへの通信は本説明の理解を優先しページ量削減の観点から使用しておりません。(本回路図に追加・修正する形での説明を別途資料を作成予定です)
作成するラダー回路プログラムの完成全体図
はじめに、今回作成を進めていくラダー回路図プログラムの下図は出来上がりの全体図です。
本ページでは、この回路図の作成を順次説明しながら進むことで解説していきますので、ラダー回路の理解と設計方法の参考としてください。
特に、3項で示すとおり、赤線四角囲み数字のところの説明位置をピックアップして説明しますが、ピックアップしていないところも同様な考え方なので、回路図全体を理解することが出来ると思います。
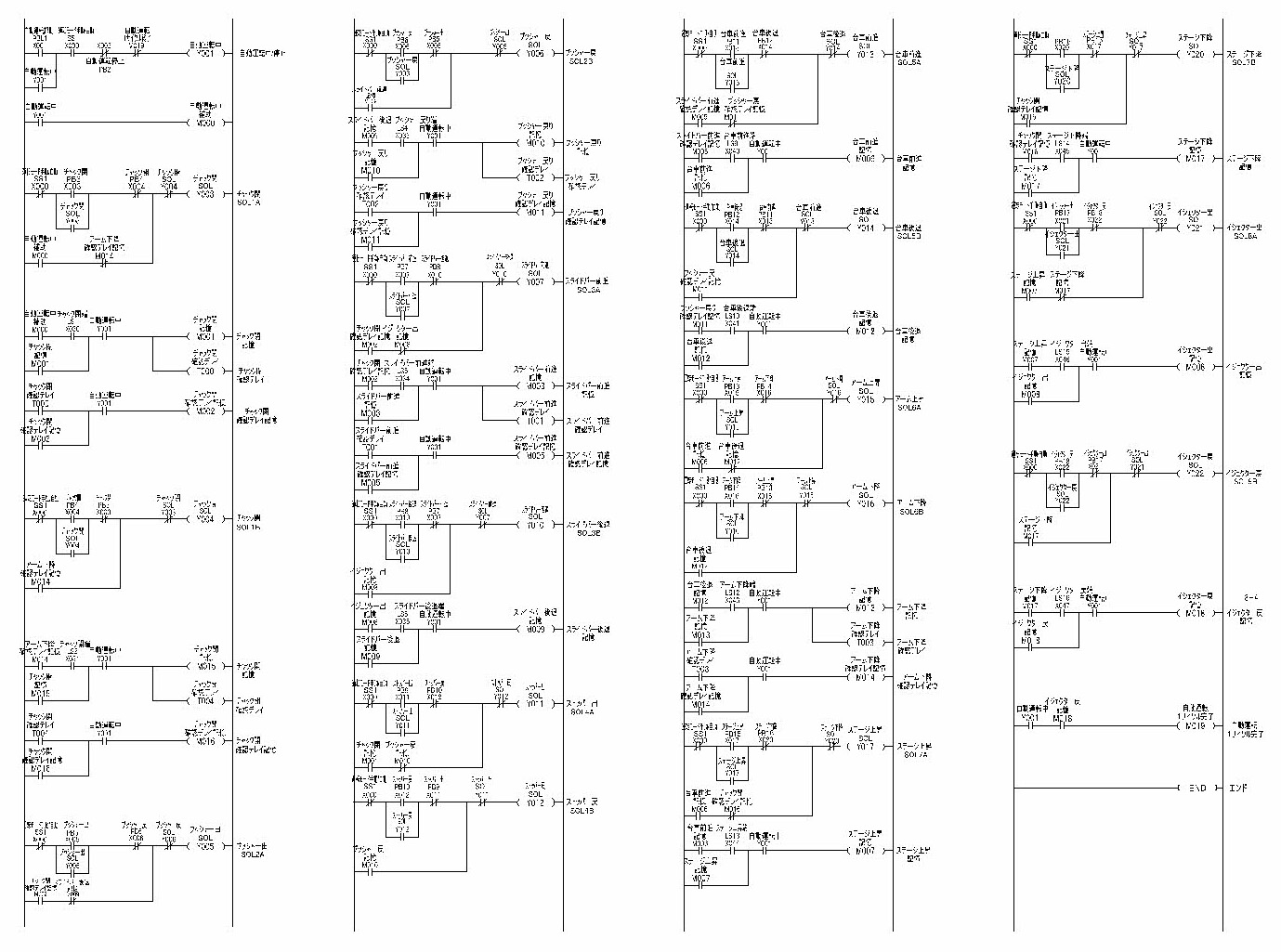
本ラダー回路図は、実際は各メーカーのプログラムにより表示のされ方が少し異なります。
(例えば、内容は異なりますが、この様です。→参考例(PDF))
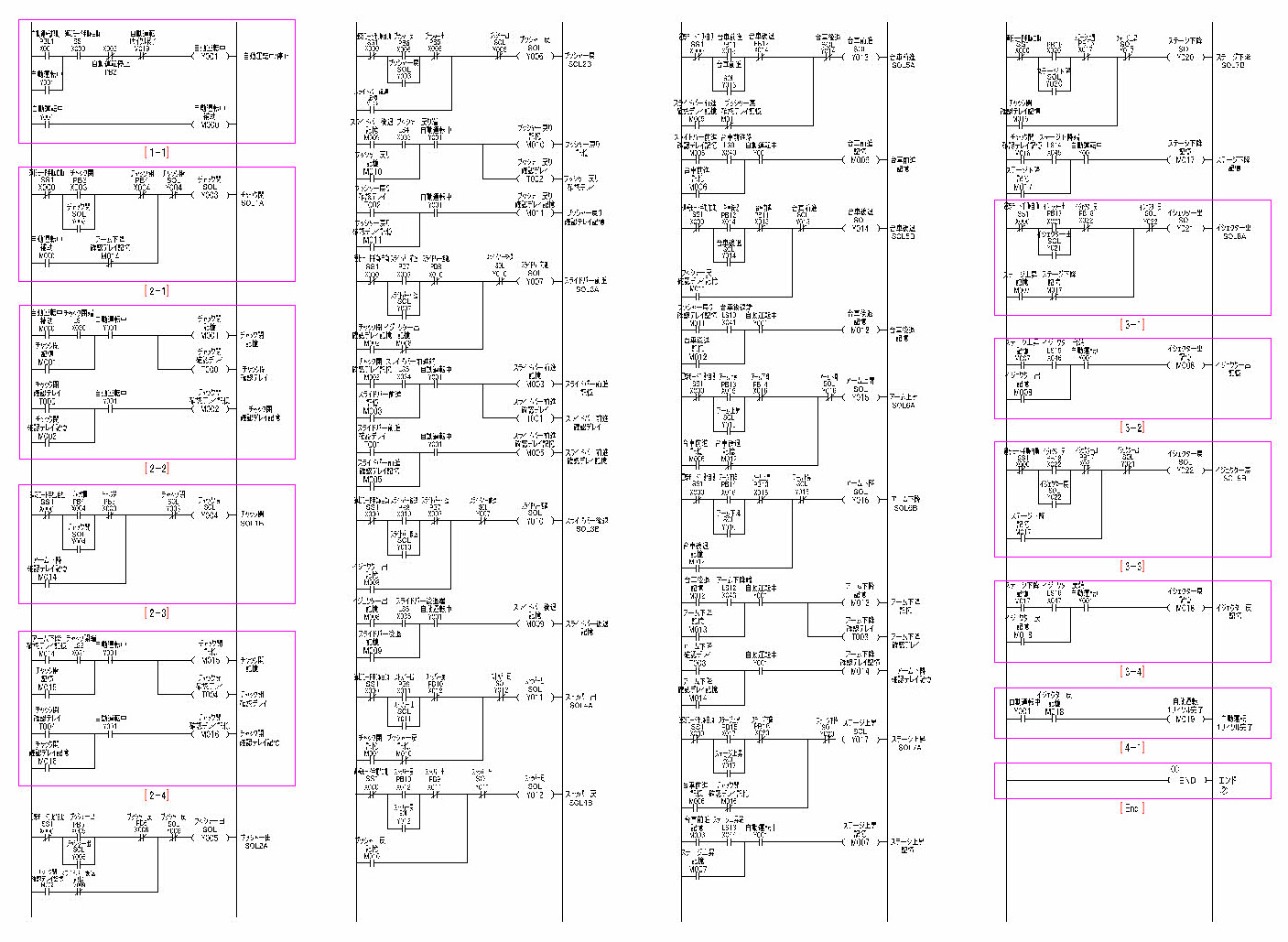
ラダー回路プログラムの説明位置(赤線四角囲み数字の位置)について
下記のPLCラダー回路プログラムの全体において、赤枠の箇所を代表に説明していきます。
【クリックにて、PDF表示】
1-1:自動運転開始、停止
2-1:チャック開自動手動駆動回路
2-2:チャック開補助回路(状態記憶回路など他)
2-3:チャック閉自動手動駆動回路
2-4:チャック閉補助回路(状態記憶回路など他)
|
| プッシャー ~ ステージ迄の
| アクチュエータ回路説明省略
|
3-1:イジェクター出自動手動駆動回路
3-2:イジェクター出補助回路(状態記憶回路など他)
3-3:イジェクター戻自動手動駆動回路
3-4:イジェクター戻補助回路(状態記憶回路など他)
4-1:自動運転終了判断
End:PLCラダー回路の終了記号
以降、上図xxに示す赤枠Noのところを代表としてピックアップして解説していきます。
回路図説明位置に対応するシステム構成図対応位置
制御盤、操作盤、M/Cの内容(電磁弁、モーター、リミットセンサー)など、赤枠の箇所を代表に説明していきます。
【制御システム構成図】
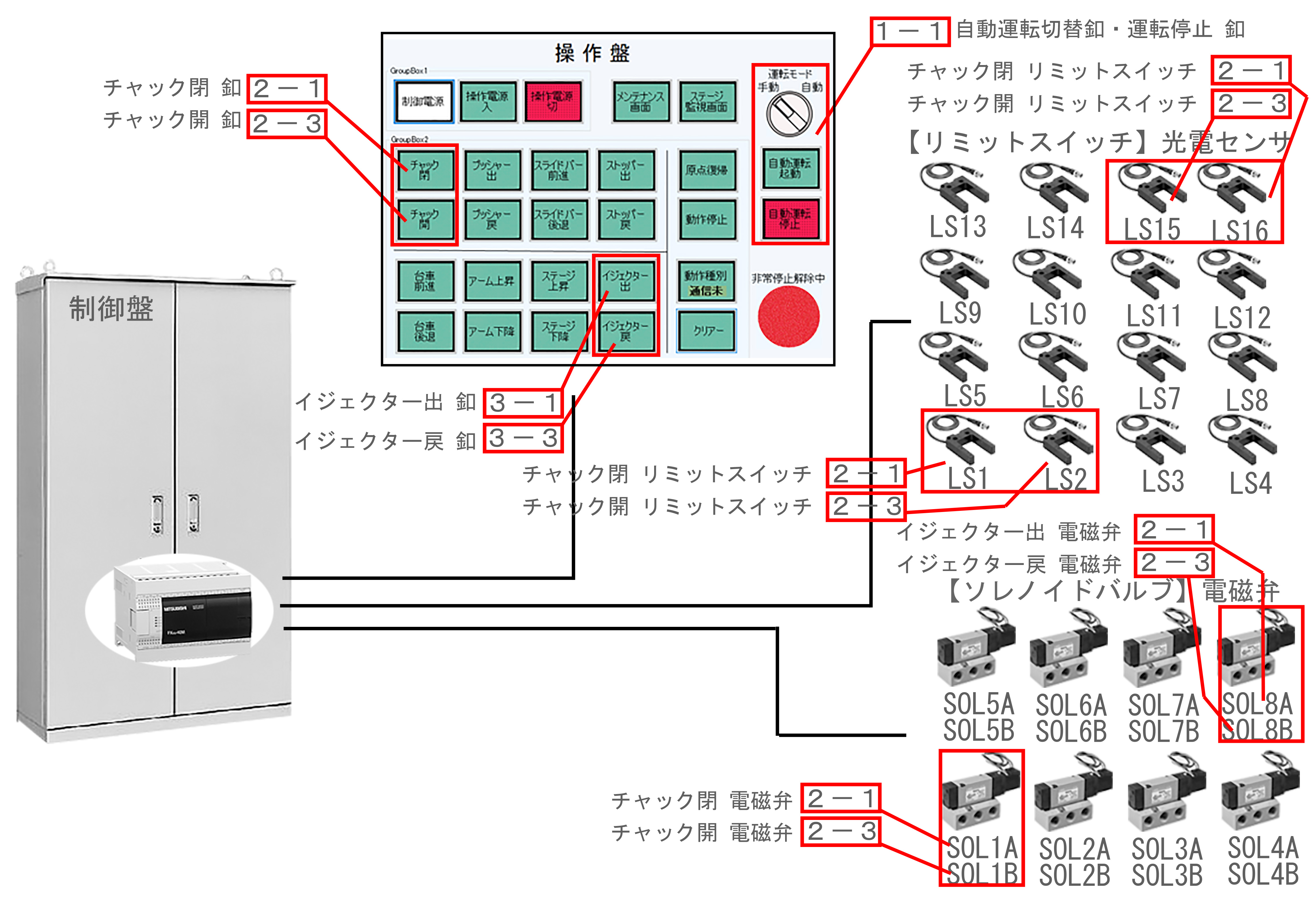
【 図2】
回路図説明位置に対応するPLC入出力割付表対応位置
PLCラダープログラムを作成するにあたっては、プログラムの各入力(操作盤取り付けの押し釦SWやM/C内の各アクチェーターの動作位置に取り付けされたリミットセンサーなど)と各出力(操作盤等表示灯、及び空圧シリンダ(アクチュエータ)などに使用される電磁弁(ソレノイド)など)をプログラムで扱える様に決めてあげる必要があります。
入力は、X000~X047、出力は、Y000~Y022 の端子に割付けて接続するとX000~、Y000~の記号で使用することが出来る様になります。
回路図説明位置に対応するPLC入力割付表対応位置
入力は、操作盤取り付けの押し釦SWやM/C内の各アクチェーターの動作位置に取り付けされたリミットセンサーなど、赤枠の箇所を代表に説明していきます。
上図、図1の構成図において、PLCに接続される入力は、操作盤の押し釦、及びなどです。
これらの各入力をPLC出力端子に割付けられた 例えばX000~X017に配線で接続します。このX000~X017を記号Noとしてこれから作成するラダープログラムで各出力として使用していきます。
【PLC入力割付表】
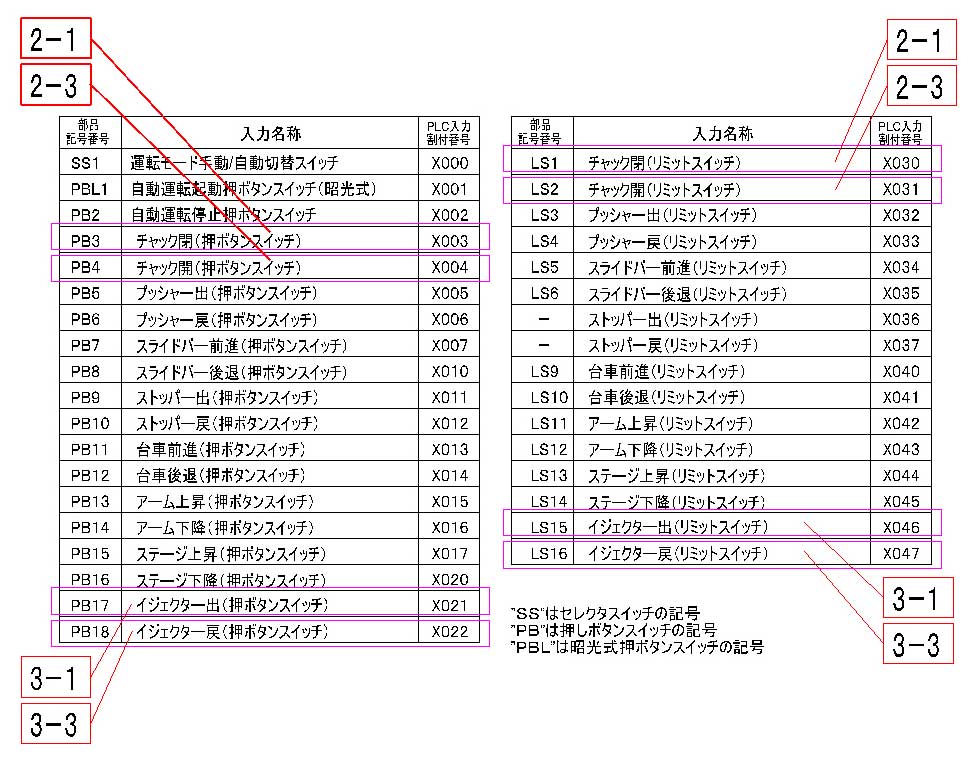
【 図3】
回路図説明位置に対応するPLC出力割付表対応位置
出力は、操作盤取り付けの表示灯、照光式押し釦の表示灯や電磁弁(SOL)の動作信号など、赤枠の箇所を代表に説明していきます。
上図、図1の構成図において、PLCに接続される出力は、操作盤等表示灯、及び空圧シリンダ(アクチュエータ)などに使用される電磁弁(ソレノイド)などです。
これらの各出力をPLC出力端子に割付けられた 例えばY000~Y017に配線で接続します。このY000~Y017を記号Noとしてこれから作成するラダープログラムで各出力として使用していきます。
【PLC出力割付表】
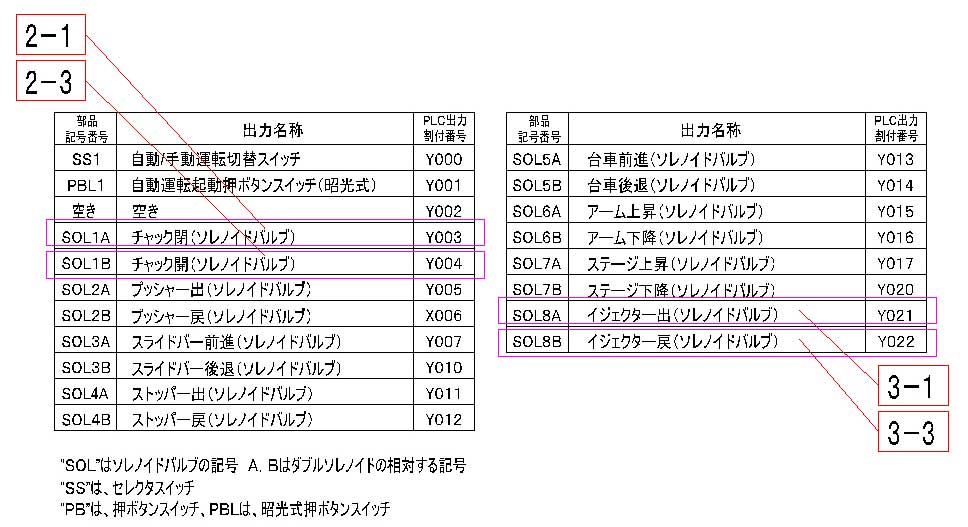
【 図4】
回路図説明位置に対応する動作タイムチャート対応位置
自動運転時どの様な動作をさせたいか
自動運転のシーケンスタイムチャートなどの動作仕様が必要となります。
口頭や記憶ではなく、必ず図面化して仕様を明確に決定します。
【自動運転時動作タイムチャート】
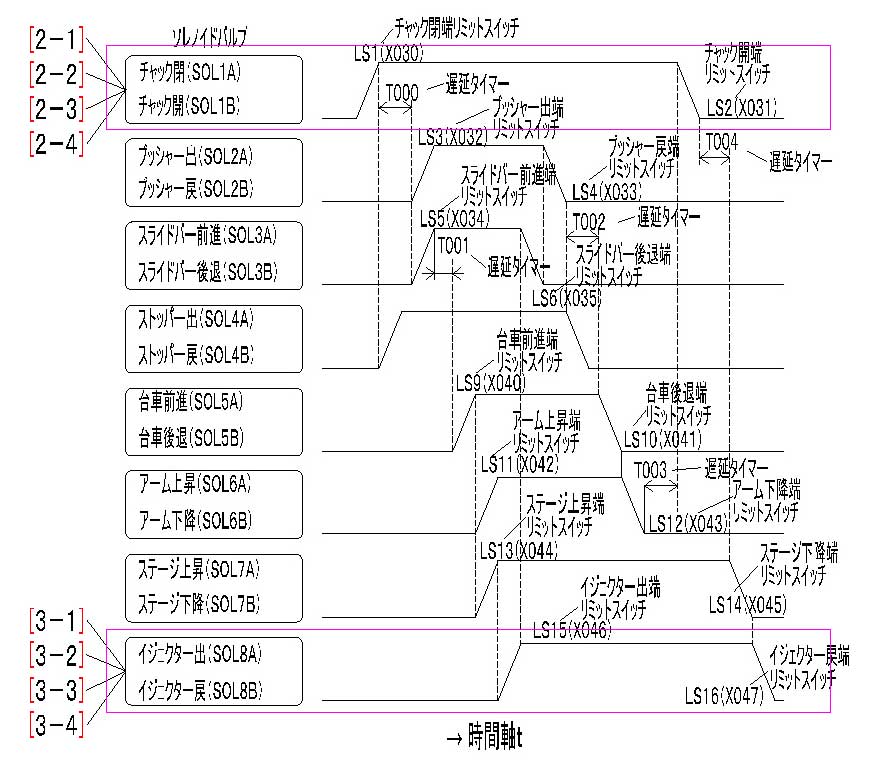
【 図5】自動運転時動作タイムチャート(従来方式プログラム作成)
ラダー回路図プログラム作成方法の説明
ラダー回路図プログラムの説明において、[1-1]、[2-1]~[2-4]、[3-1]~[3-4]、[4-1]、[End]は、上記の全体回路図、IO割付表、タイムチャート、および下記のラダー回路図プログラム作成方法の説明に記載の記号に対応するものです。各図の支持位置を一致参照しながら理解を願います。
※下記の回路図で修正箇所として、自動運転中は手動押釦がきかないように各手動回路ラインに自動運転中B接点を挿入予定。
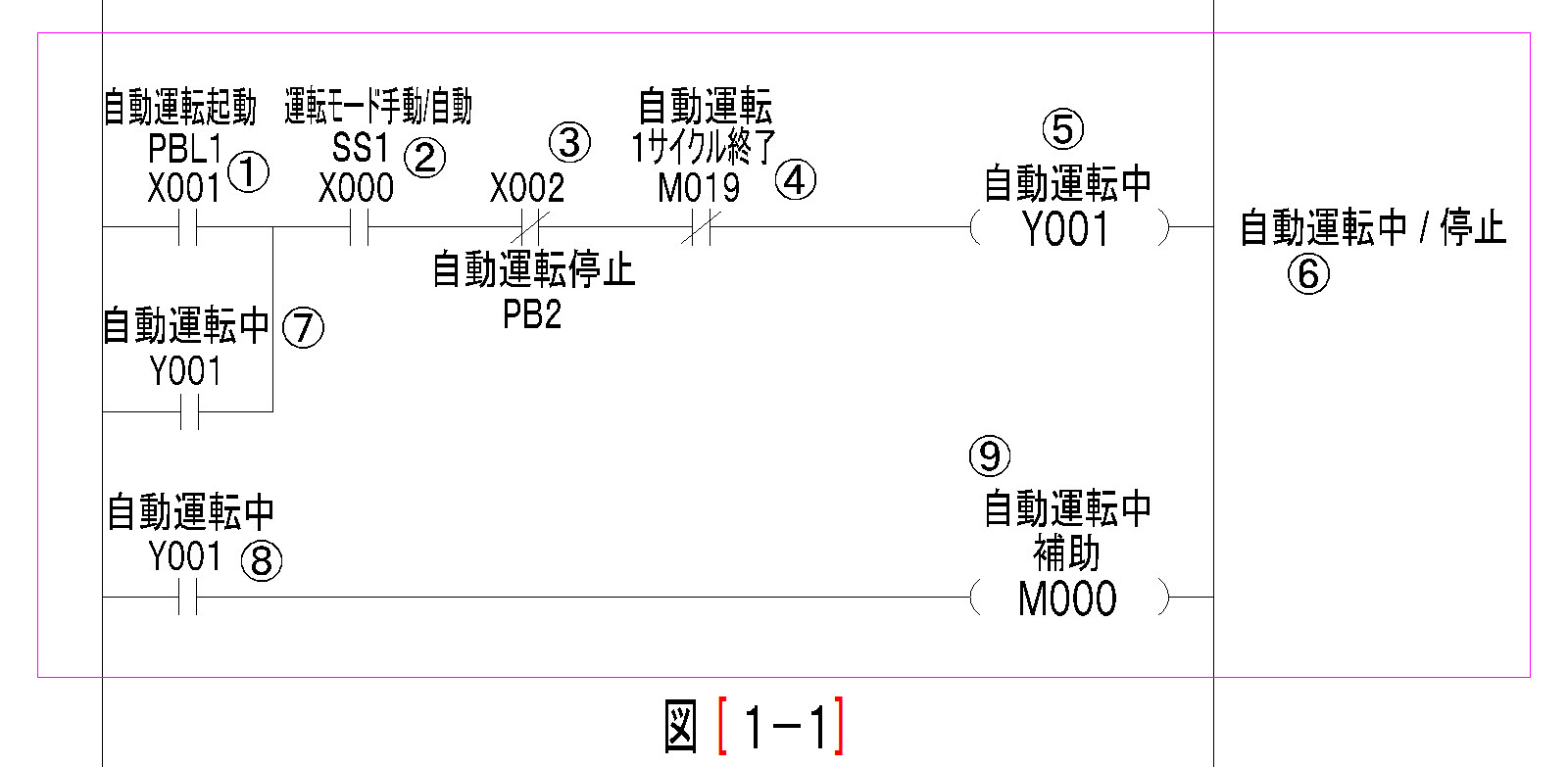
下図[1-1]において
運転ード手動自動SS1(セレクタスイッチ)X000②が自動モード側にセレクトつまりONで、自動運転起動押釦PBL1(押釦)X001①を押すと、自動運転中Y001出力⑤がONします。
これにより接点である自動運転中Y001出力⑦もONするので、自動運転起動押釦(PBL1)①X001がOFFしてもY001⑤はON状態維持、自己保持(セルホードとも言う)し、自動運転がスタートされます。
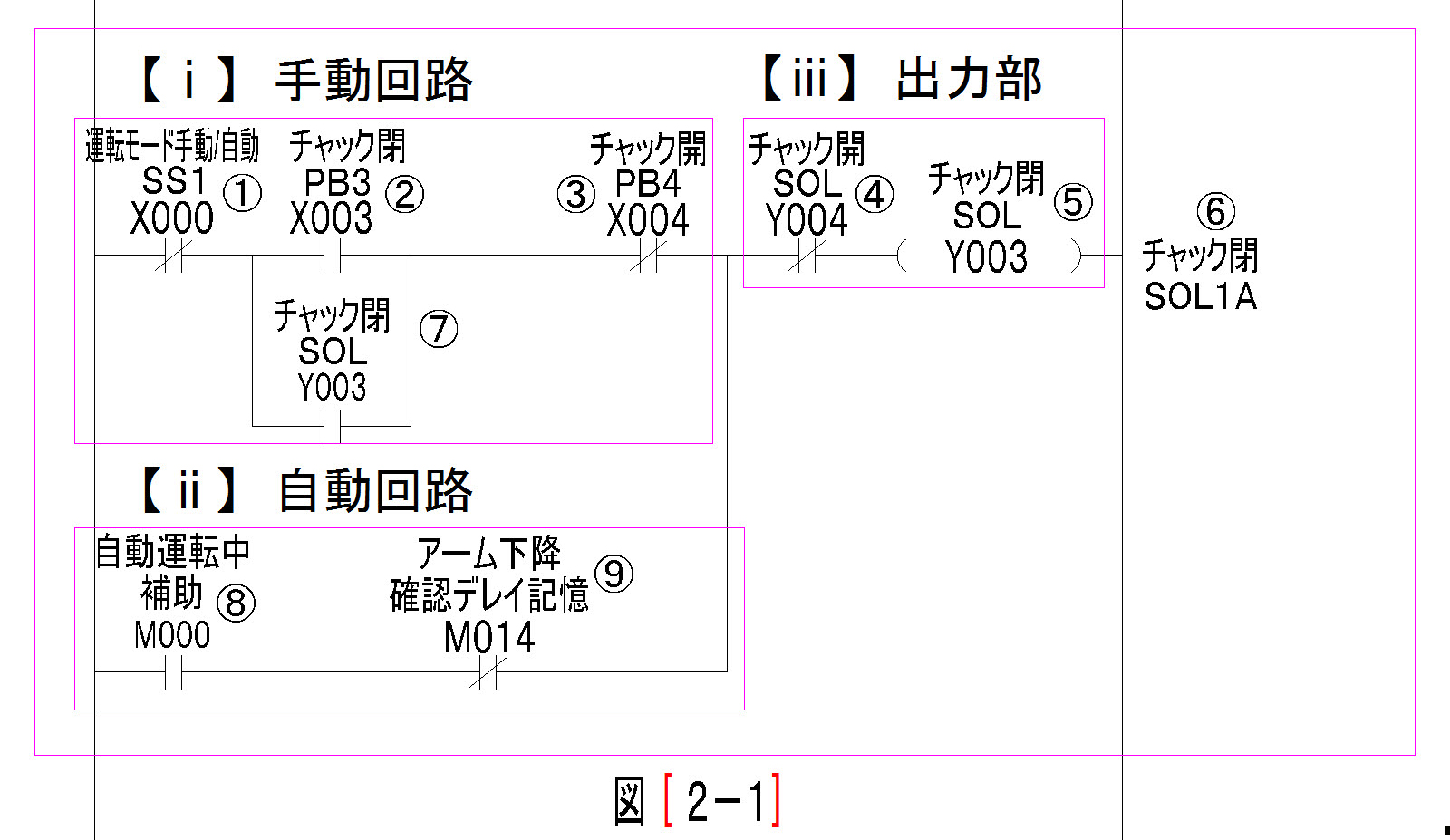
下図[2-1]において
下記の説明回路番号[2-1]はシーケンス制御に使われる基本的なアクチュエータ出力(チャック閉)の回路です。本回路はチャック閉じですが、下記の説明回路番号[2-2]のチャック開とセットで使い、同時ONがない様にB接点でお互いにインターロックをかけています。
【ⅰ】手動回路と【ⅱ】自動回路を自動運転中補助⑧に切り替えて使い、最終段の出力部につなげます。
ここでは、出力部はチャック閉じ⑤の電磁弁のON(Y003は、PLCのオープンコレクタ出力)に使われています。
アーム下降確認デレイ記憶M014⑨は、記憶回路で成立させた内部補助リレーの接点です。これは、自動運転中Y001⑧ONのタイミングからチャック閉SOL Y003⑤をONし、アーム下降確認デレイ記憶M014⑨のONのタイミングでチャック閉SOL Y003⑤出力をOFF(B接点なので)させています。
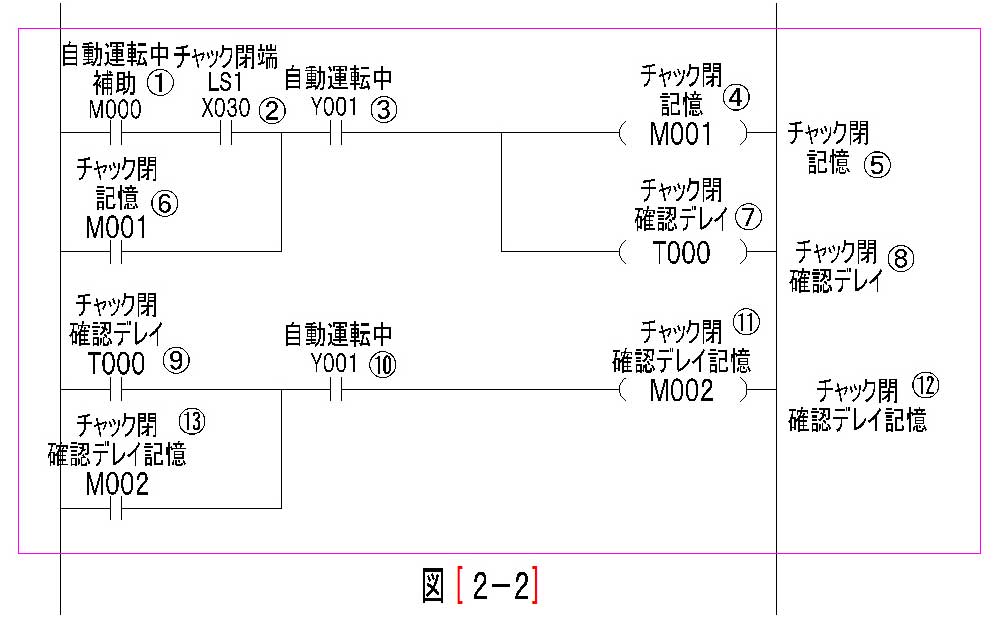
下図[2-2]において
下記の説明回路番号[2-2]はシーケンス制御におけるアクチュエータ出力(チャック閉)の記憶回路です。
自動運転中Y001③がONの条件で、チャック閉端のリミットSW LS1 X030②がONしたときに、チャック閉記憶M001④がONし、この接点⑥で自己保持し記憶させます。
同時に、チャック閉記憶M001④がONのタイミングで、チャック確認デレイT000⑦を起動させます。そして、T000⑦のタイムアップ後の接点T000⑨によりチャック確認デレイ記憶M002⑪をONし、この接点⑬で自己保持し記憶させます。
これにより、チャック閉、およびタイムアップ後までの一連の動作の終了を記憶させています。
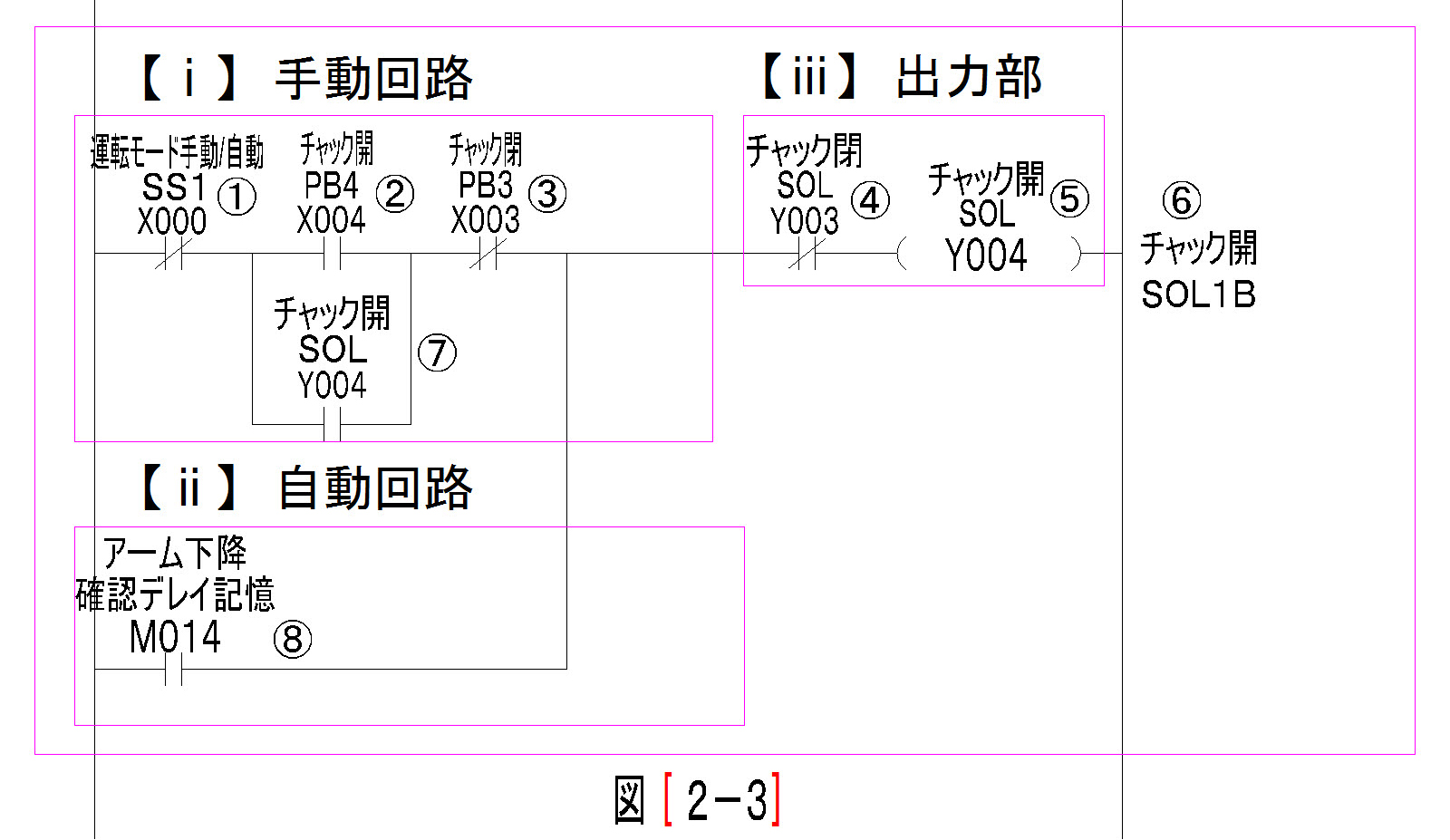
下図[2-3]において
下記の説明回路番号[2-3]はシーケンス制御に使われる基本的なアクチュエータ出力(チャック開)の回路です。本回路はチャック開ですが、上記の説明回路番号[2-1]のチャック閉とセットで使い、同時ONがない様にB接点でお互いにインターロックをかけています。
【ⅰ】手動回路と【ⅱ】自動回路を切り替えて使い、最終段の出力部につなげます。
ここでは、出力部はチャック開⑤の電磁弁のON(Y004は、PLCのオープンコレクタ出力)に使われています。
アーム下降確認デレイ記憶M014⑧は、前動作の記憶回路で成立させた内部補助リレーの接点です。この接点のタイミングでチャック開SOL Y004出力⑤をONさせています。
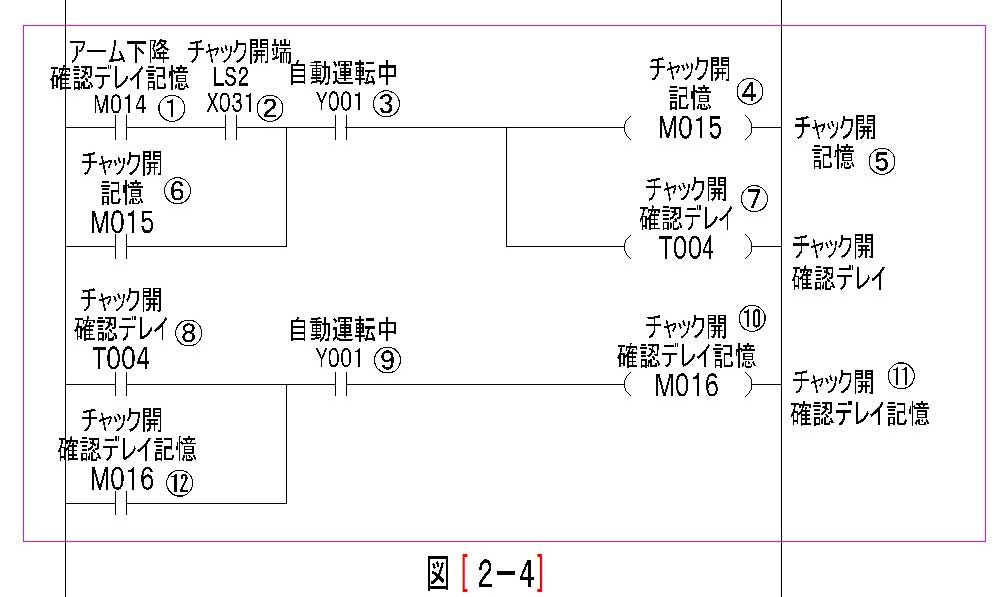
下図[2-4]において
下記の説明回路番号[2-4]はシーケンス制御におけるアクチュエータ出力(チャック開)の記憶回路です。
自動運転中Y001③がONの条件で、前動作の記憶回路でアーム下降確認デレイ記憶M014①がONし、チャック開端のリミットSW LS2 X031②がONしたときに、チャック開記憶M015④がONし、この接点⑥で自己保持します。
同時に、チャック開記憶M015④がONのタイミングで、チャック開確認デレイタイマT004⑦を起動させます。そして、T004⑦のタイムアップ後、T004の接点⑧によりチャック開確認デレイ記憶M016⑩をONし、自己保持⑫させます。
これにより、チャック開、およびタイムアップ後まで一連の動作の終了を記憶させています。
|
|
プッシャー ~ ステージ迄の
アクチュエータ回路説明は同様なので
省略です
|
|
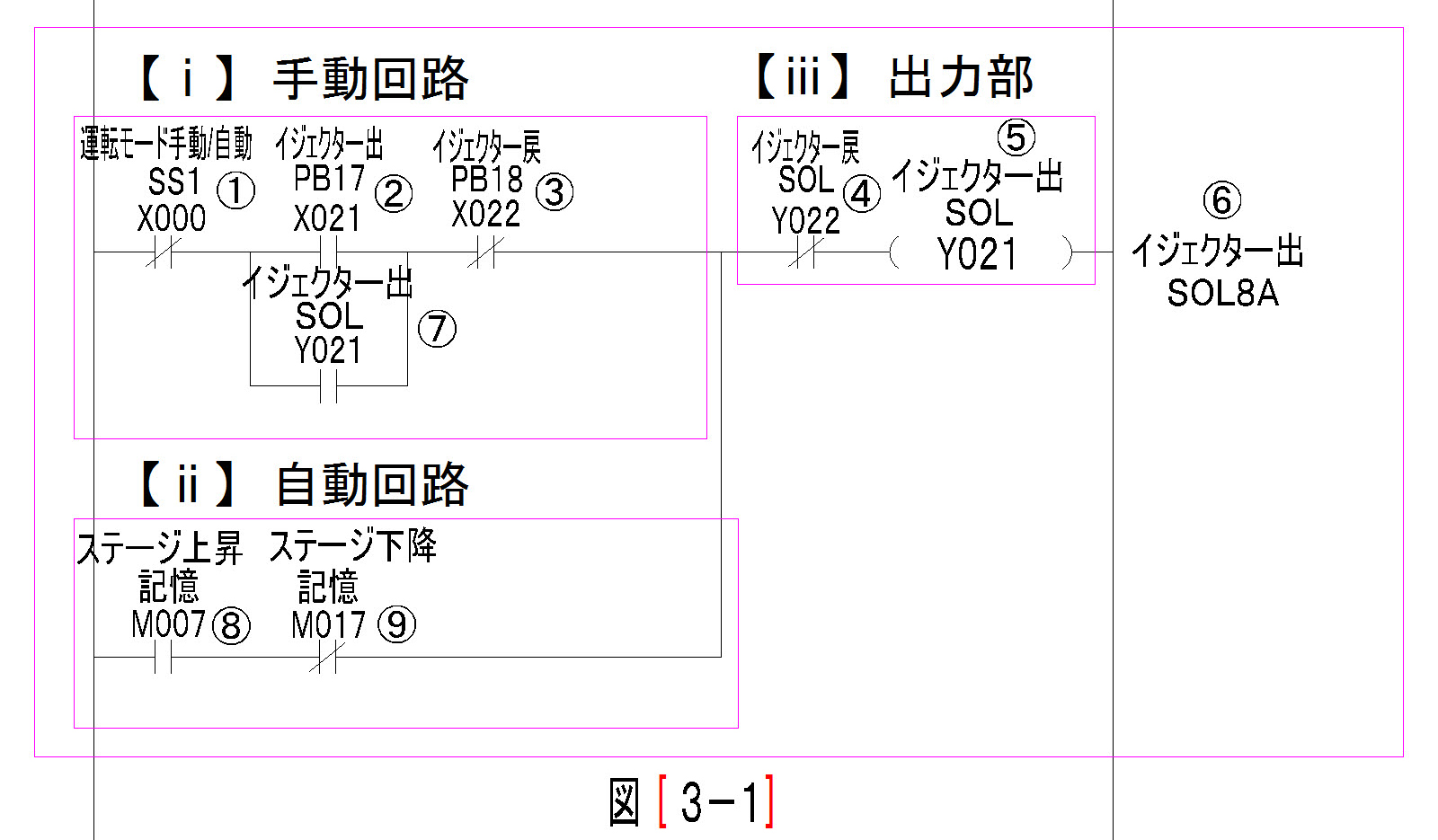
下図[3-1]において
下記の説明回路番号[3-1]はシーケンス制御に使われる基本的なアクチュエータ出力(イジェクター出)の回路です。本回路はイジェクター出ですが、下記の説明回路番号[3-2]のイジェクター戻とセットで使い、同時ONがない様にB接点でお互いにインターロックをかけています。
【ⅰ】手動回路と【ⅱ】自動回路を切り替えて使い、最終段の出力部につなげます。
ここでは、出力部はイジェクター出⑤の電磁弁のON(Y021は、PLCのオープンコレクタ出力)に使われています。
ステージ上昇記憶M007⑧やステージ加工記憶M017⑨は、記憶回路で成立させた内部補助リレーの接点です。これは、ステージ上昇記憶M007⑧ONのタイミングからイジェクター出SOL Y021⑤をONし、ステージ下降記憶M017⑨のONのタイミングでイジェクター出SOL Y021⑤出力をOFF(B接点なので)させています。
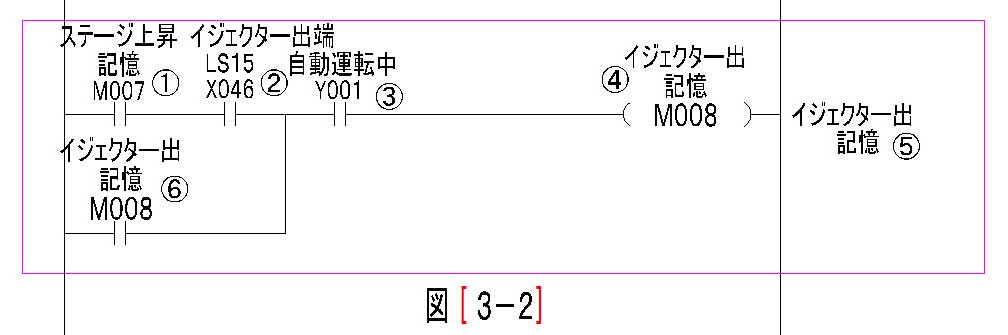
下図[3-2]において
下記の説明回路番号[3-2]はシーケンス制御におけるアクチュエータ出力(イジェクター出)の記憶回路です。
自動運転中Y001③がON、およびステージ上昇記憶M007①がONの条件で、イジェクター出端のリミットSW LS15 X046②がONしたときに、イジェクター出記憶M008④がONし、この接点M008⑥で自己保持させます。
これにより、イジェクター出までの動作の終了を記憶させています。
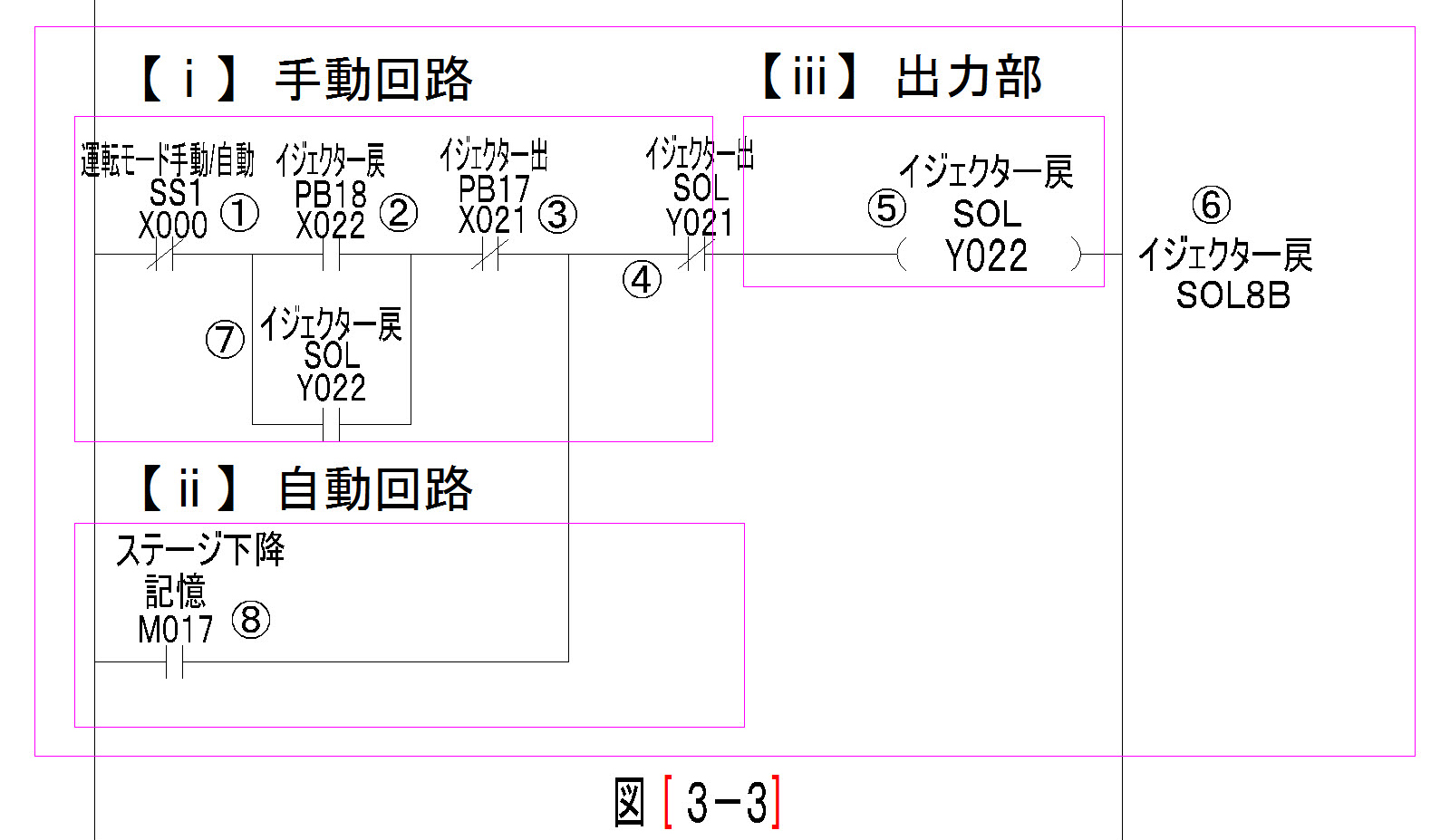
下図[3-3]において
下記の説明回路番号[3-3]はシーケンス制御に使われる基本的なアクチュエータ出力(イジェクター戻)の回路です。本回路はイジェクター戻りですが、上記の説明回路番号[3-2]のイジェクター出とセットで使い、同時ONがない様にB接点でお互いにインターロックをかけています。
【ⅰ】手動回路と【ⅱ】自動回路を切り替えて使い、最終段の出力部につなげます。
ここでは、出力部はイジェクター戻り⑤の電磁弁のON(Y022は、PLCのオープンコレクタ出力)に使われています。
ステージ下降記憶M017⑧は、前動作の記憶回路で成立させた内部補助リレーの接点です。この接点のタイミングでイジェクター戻りSOL Y022⑤をONさせています。
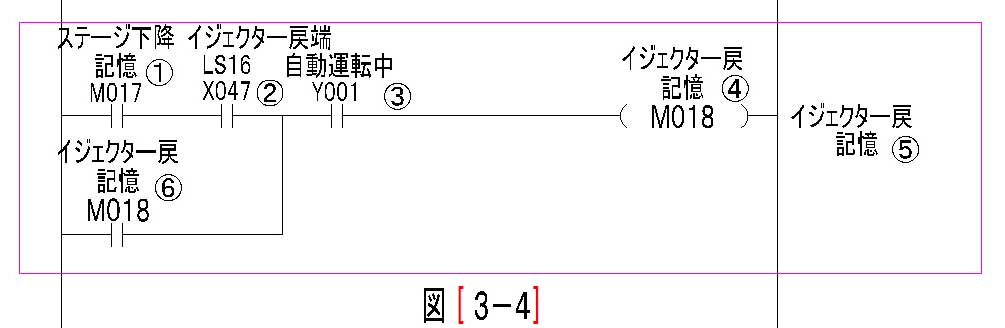
下図[3-4]において
下記の説明回路番号[3-4]はシーケンス制御におけるアクチュエータ出力(イジェクター戻)の記憶回路です。
自動運転中Y001③がONの条件で、ステージ下降記憶M017①がONの時、イジェクター戻り端リミットSW LS16 X047②がONしたときに、イジェクター戻 記憶M018④がONし、この接点⑥で自己保持します。
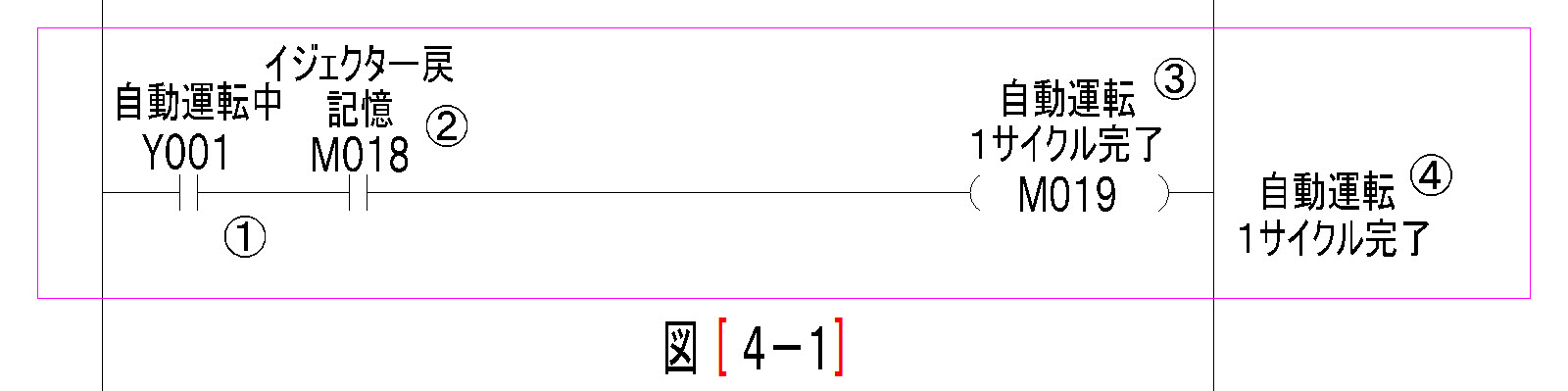
下図[4-1]において
下記の説明回路番号[4-1]は自動運転1サイクル終了判定回路として、自動運転中Y001①がONの条件で、イジェクター戻 記憶⑱がONになると、自動運転1サイクル完了M019③がONします。
自動運転1サイクル完了M019③のB接点で上記の[1-1]の自動運転起動回路をリセットします。
これにより、これまで各一連の動作を自己保持回路で記憶している補助接点リレーもすべてリセットOFFされます。
下図[End]において
下記の説明回路番号[End]はPLCのラダー回路図で終了の意味を持つお決まりごとの命令です。

関連記事 前後への移動
| 1.『PLCラダー回路の作成1/3(仕様書の作成編)』 |
| 2.『PLCラダー回路(従来方式)の作成2/3(プログラミング編)』 or 『PLCラダー回路(ステージ選択方式)の作成2/3(プログラミング編)』 |
| 3.『PLCラダー回路の作成3/3(デバッグ編)』 |
本記事において出来上がったラダー回路図の動作
回路図の動きの動画はここをクリック
PLCラダー回路図が動作していく状況を電気が導通していく太い赤色線で表示しています。